The Point Cloud Data
The point cloud data should be represented as a numpy array with N rows, and at least 3 columns. Each row corresponds to a single point, which is represented using at least 3 values for its position in space (x,y,z).
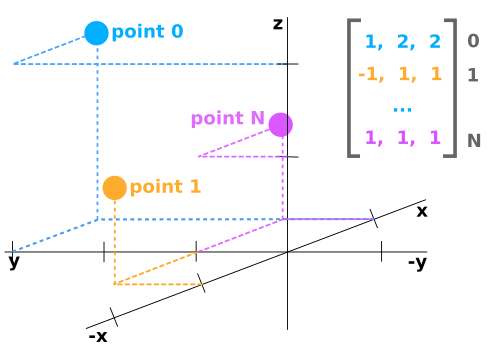
If the point cloud data is from a LIDAR sensor then it might have aditional values for each point, such as "reflectance", which is a measure of how much of the laser light beam was reflected back by the obstacle in that position. In this case the point cloud data might be an Nx4 array.